Our Robots
Wilder

Wilder was made to pick up Cargo and shoot it into the Upper and Lower Hub; then climb up a series of monkey bars. Wilder proved successful during our first regional of season, the Lake Superior Regional. Our team was picked for the number one alliance, with Team 1732 (Hilltoppers) and Team 2052 (KnightKrawlers), and placed 1st at the event. We also competed in the Great Northern Regional and the Houston World Championship. We ended being the 5th Alliance Captains and made it to the Roebling Semi-Finals. Which overall placed us top 20 overall Internationally out of 4,000 Teams. Because of our outstanding performance at Lake Superior we were able to attend MN State where we ended up receiving the Dunwoody Engineering Inspiration Award.


Mater
Mater was designed to pick up power cells and shoot them into the Power Port. Mater also was tasked with climbing up the Generator Switch to earn points. We ended up only competing in the Northern Lights Regional, where we placed 19th overall and got the Team Spirit Award. We were not able to compete in any more competitions due to Covid-19.

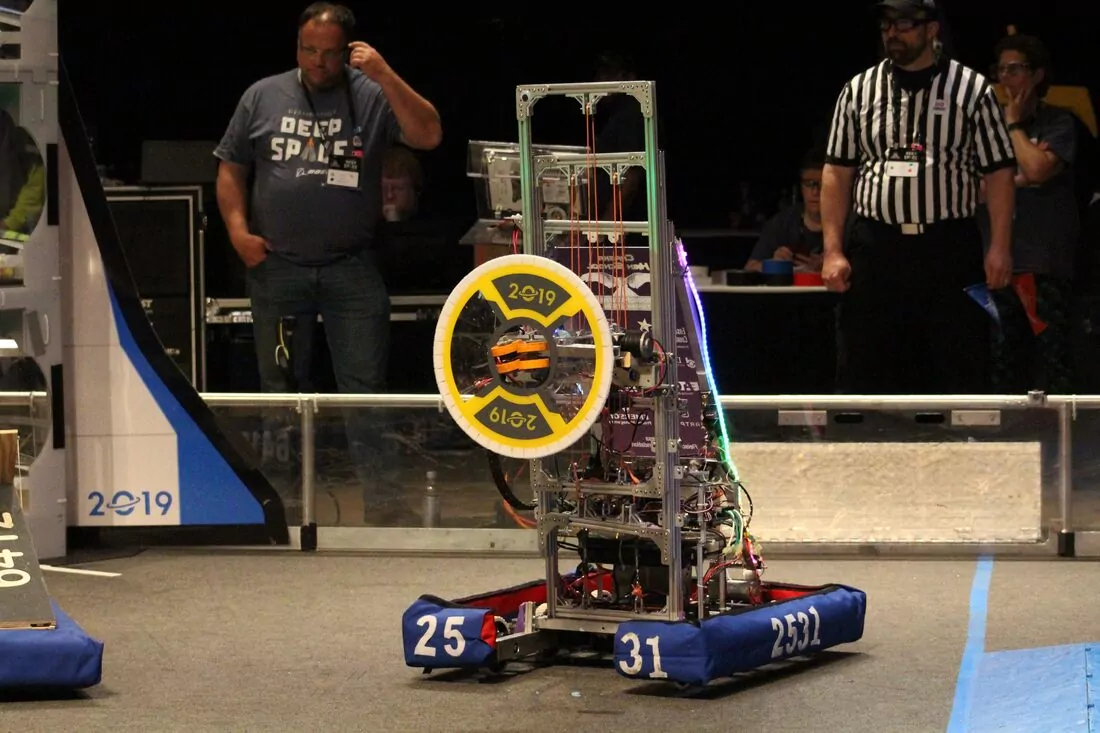
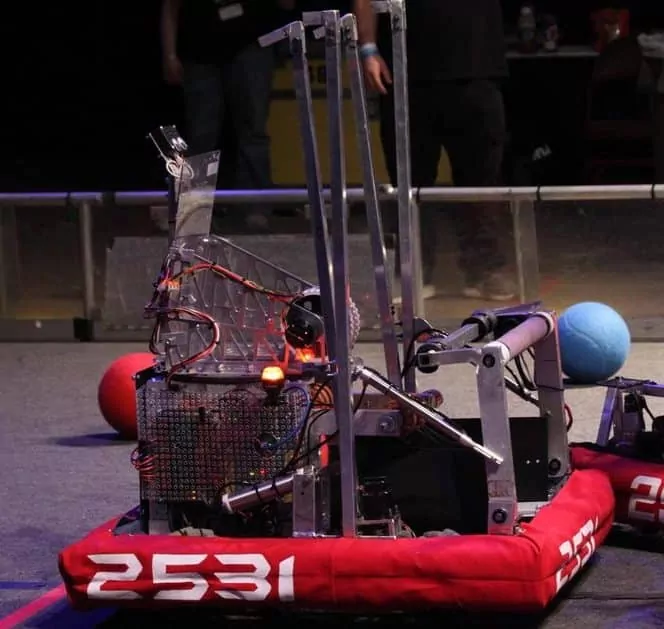
J.J. Barely
J.J. Barely was designed to grab hatch panels and place them on the cargo ships and all three levels of the rocket. It competed at the Lake Superior Regional and Seven Rivers Regional, but its performance was heavily impacted by inclement weather as our team had to leave the Lake Superior Regional early due to an incoming snow storm.


Paperweight
Paperweight was designed to pick up power cubes and deliver them to the switch and the scale. It competed at the Great Northern Regional and the Northern Lights Regional, and placed in the top 24 teams.


Unnamed
Our robot was designed to deliver gears to the airship, dump fuel into a low goal, and climb a rope in the 30 second endgame. It competed at the Lake Superior Regional and the Wisconsin regional, but due to its build structure, the results from the competitions were not good.


Bernie
Bernie was designed to maneuver over obstacles like a rock wall and to pick up 'boulders' and shoot them into towers. Bernie competed only at the North Star Regional, due to many programming issues that prevented us from performing well.


Clark
Clark was designed to pick up totes and recycling bins. Programmed with an autonomous mode to score the yellow bins, he can also score cooperation points and stack totes 4 high. Clark competed at the Lake Superior regional competition as well as North Star where he was a finalist. Which later led to competing at the the World Championships in St. Louis.


Bonnie
Bonnie was designed to shoot the game piece into the high goal for 10 points as well as the low goal for 1 point. It could also pass to other robots, a very crucial part to the game, Aerial Assist. This robot placed 35th at the North Star regional.


Hansel
Hansel was designed to dump frisbees into the 1 point goal as well as climb the pyramid for 10 points. Hansel made it to the Minnesota State competition, and won Quality Award while making it to the semi-finals as alliance captains at the North Star regional.


Unnamed
This robot was designed to pick up basketballs off the ground and shoot them into the baskets. It featured a rotating turret and a tracking camera designed to track the baskets by the reflecting tape. This robot competed at the 10,000 Lakes regional competition.


Unnamed
This robot was designed to lift inner-tubes of varying shapes onto pegs. It competed at the North Star regional competition.


Unnamed
This robot was designed to direct soccer balls into goals, traverse bumps in the field, and go through a tunnel located in the middle of the field.

Teagen
Teagen was designed for the game Lunacy. It made it to the quarterfinals at the 10,000 Lakes regional.


Rookie
This is our rookie year robot designed for the game Overdrive. Rookie ranked 5th after the preliminary matches and made it to quarter-finals at the 2008 Minnesota Regional.
545 Pioneer Trail Chaska, MN 55318
Email us at 2531robohawks@gmail.com
Web design by Jin Hammond
Photos by Matea F. (2021-22) Aerith C. (2017-20), Taylor F. (2017)